Goodfellow Deep Learning — Chapter 9.8: Efficient Convolution Algorithms
Separable Convolution
A convolution kernel is separable when its multi-dimensional weights can be written as the outer product of several one-dimensional filters. In this case, a 2D convolution with a \(k \times k\) kernel can be executed as two sequential 1D convolutions: first applying a vertical filter, then a horizontal one. This decomposition does not change the output—each pixel still aggregates information from the full \(k \times k\) neighborhood—but it significantly reduces computational cost.
Standard 2D convolution requires \(O(HWk^2)\) operations, while separable convolution reduces this to \(O(HWk)\). Parameter storage also shrinks from \(k^2\) to \(2k\). When such a factorization exists, it enables faster and more memory-efficient models without sacrificing accuracy, and is therefore an important strategy for designing efficient convolutional networks.
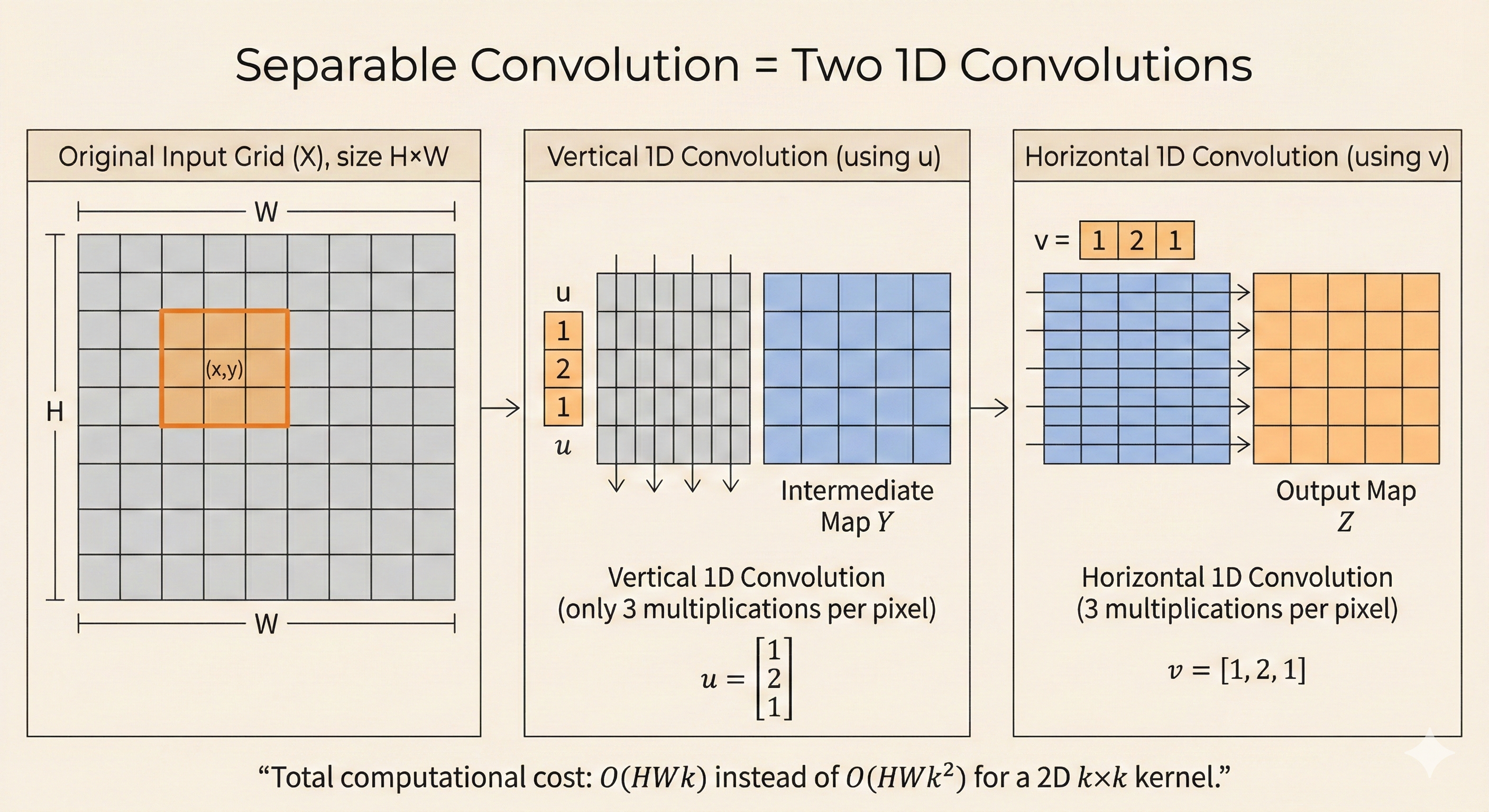 Figure: Separable convolution decomposes a 2D kernel into two 1D filters (vertical and horizontal), reducing computational complexity from O(HWk²) to O(HWk) while maintaining the same receptive field.
Figure: Separable convolution decomposes a 2D kernel into two 1D filters (vertical and horizontal), reducing computational complexity from O(HWk²) to O(HWk) while maintaining the same receptive field.
Key Insight
Separable convolution achieves the same output as standard 2D convolution but with dramatically reduced computational cost. By factorizing a \(k \times k\) kernel into two \(k \times 1\) filters, we transform an \(O(k^2)\) operation into \(O(k)\)—a massive speedup for large kernels. This decomposition is particularly valuable in mobile and edge deployments where computational resources are limited, and forms the foundation of efficient architectures like MobileNet.