MIT 18.065: Lecture 23 - Accelerating Gradient Descent (Momentum)
In deep learning, stochastic gradient descent updates parameters using gradients from mini-batches rather than the full dataset.
Ill-Conditioned
An optimization problem is ill-conditioned when curvature differs dramatically across directions.
Consider \[ f(x)=\frac{1}{2}x^\top Sx,\qquad S=\begin{bmatrix}1&0\\0&b\end{bmatrix},\quad 0<b\ll 1. \]
Then \[ \nabla f(x)=Sx,\qquad \nabla^2 f(x)=S. \]
The eigenvalues are \[ \lambda_1=1,\qquad \lambda_2=b, \] so the condition number is \[ \kappa(S)=\frac{\lambda_{\max}}{\lambda_{\min}}=\frac{1}{b}. \]
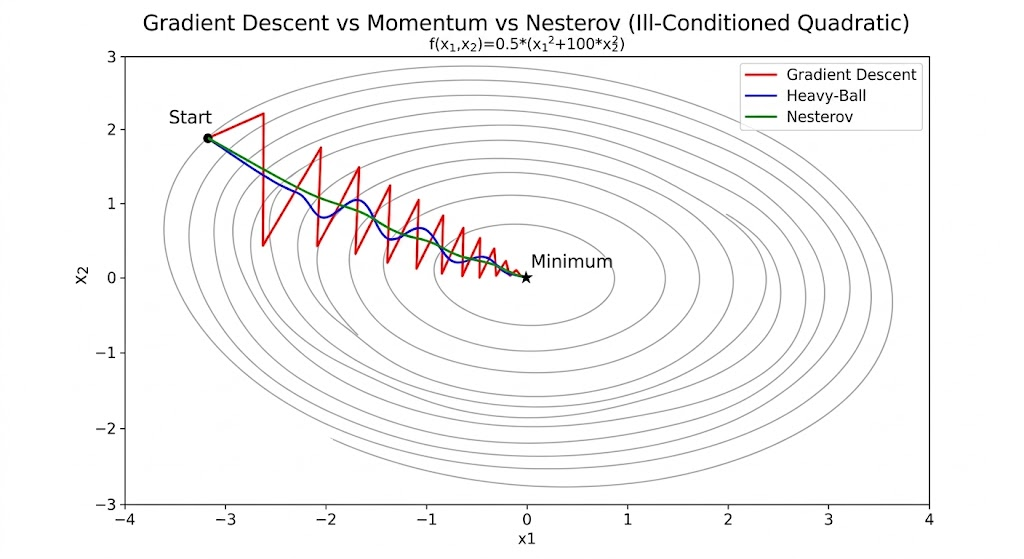
When \(b\ll 1\), \(\kappa\) is large and level sets become elongated ellipses.
Gradient descent then zigzags: overshooting across the steep direction while making slow progress along the flat direction.
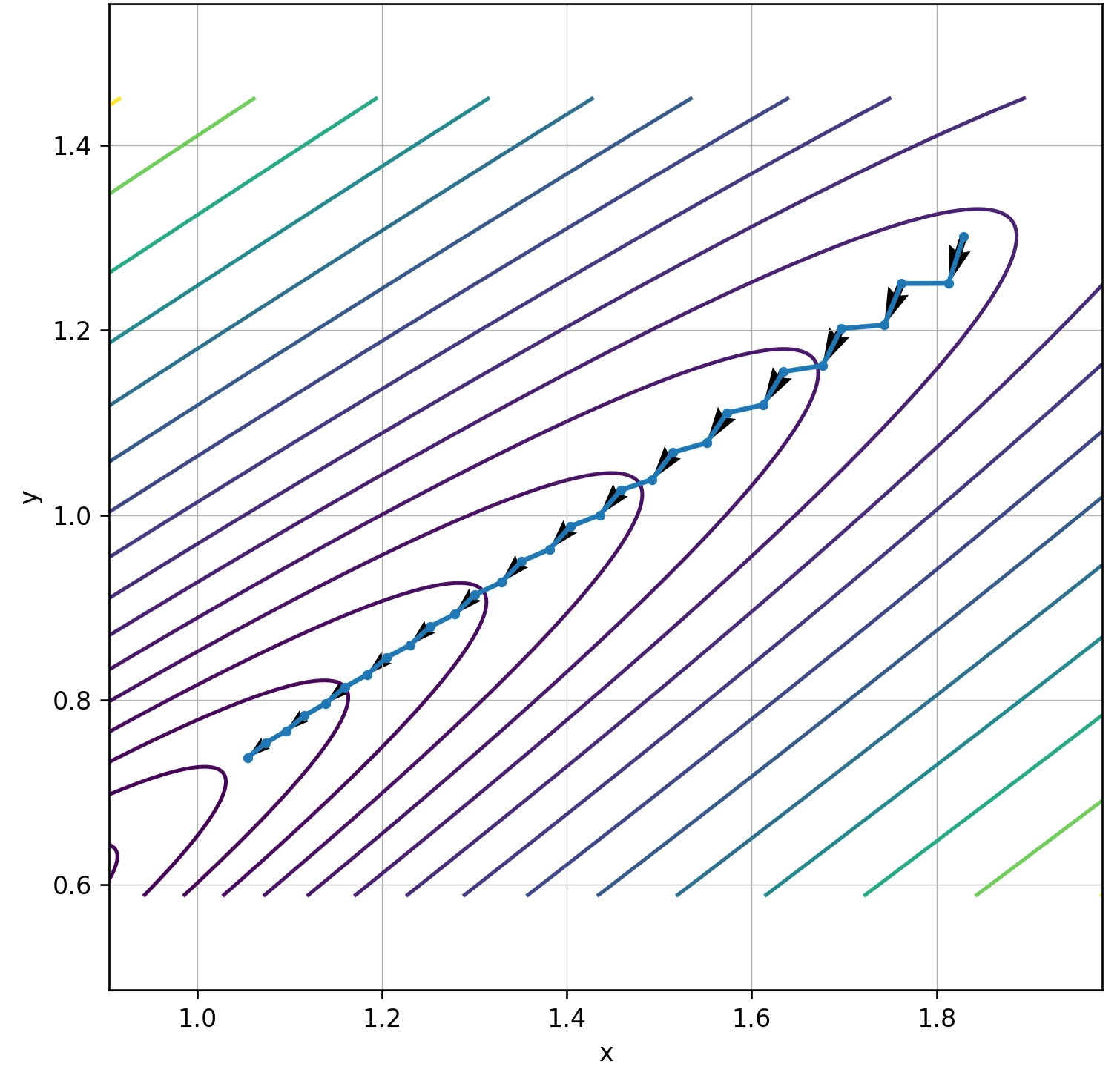
Momentum
Why Momentum Reduces Zigzag
In ill-conditioned valleys:
- Steep direction: large gradient components can cause oscillation.
- Flat direction: small gradients make progress slow.
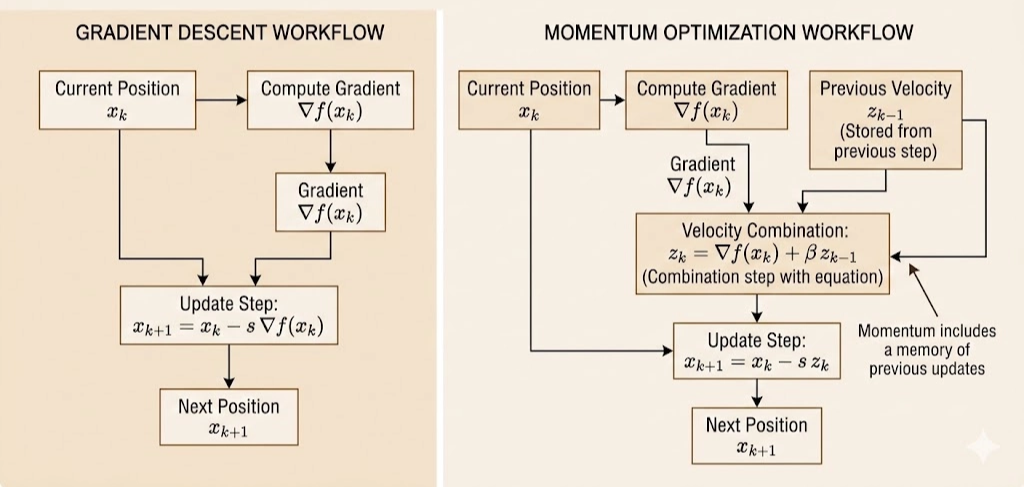
Momentum adds memory: \[ z_k=\nabla f(x_k)+\beta z_{k-1},\qquad x_{k+1}=x_k-sz_k,\qquad 0\le\beta<1. \]
Equivalent heavy-ball form: \[ x_{k+1}=x_k-s\nabla f(x_k)+\beta(x_k-x_{k-1}). \]
Effects:
- Damping across-valley oscillation: alternating components are partially canceled.
- Accumulating along-valley velocity: aligned components reinforce over iterations.
This smooths the path and accelerates convergence.
Example: Momentum on a Quadratic Gives a () Rate
Analyze \[ f(x)=\frac{1}{2}x^\top Sx,\qquad \nabla f(x)=Sx, \] with symmetric positive definite \[ S=Q\Lambda Q^\top,\qquad \Lambda=\mathrm{diag}(\lambda_1,\dots,\lambda_n),\qquad 0<\mu:=\lambda_{\min}\le \lambda_i\le \lambda_{\max}:=L, \] and \[ \kappa=\frac{L}{\mu}. \]
1) Heavy-ball update
\[ x_{k+1}=x_k-sSx_k+\beta(x_k-x_{k-1}). \]
2) Decouple along eigenvectors
Let \(y_k=Q^\top x_k\), then \[ y_{k+1}=(I-s\Lambda)y_k+\beta(y_k-y_{k-1}), \] and each coordinate satisfies \[ y_{k+1}^{(i)}=(1-s\lambda_i+\beta)\,y_k^{(i)}-\beta\,y_{k-1}^{(i)}. \]
3) Characteristic polynomial
For fixed (), assume (y_k=r^k). Then \[ r^2-(1-s\lambda+\beta)r+\beta=0. \] Convergence is governed by the spectral radius (largest (|r|)).
4) Optimal parameters
Classical optimal heavy-ball parameters on quadratics: \[ \beta^\star=\left(\frac{\sqrt{\kappa}-1}{\sqrt{\kappa}+1}\right)^2,\qquad s^\star=\frac{4}{(\sqrt{L}+\sqrt{\mu})^2}. \] Worst-case contraction factor: \[ \rho^\star=\frac{\sqrt{\kappa}-1}{\sqrt{\kappa}+1}. \] So \[ \|x_k-x^\star\|\lesssim (\rho^\star)^k\|x_0-x^\star\|. \]
5) Interpretation
- Gradient descent (optimized step) depends on (): roughly (1-(1/)).
- Momentum improves dependence to (): roughly (1-(1/)).
This explains why momentum dramatically improves ill-conditioned optimization.
Near an optimum, smooth objectives are locally quadratic via Hessian approximation, so this eigen-direction analysis remains highly informative in practice.
Nesterov Accelerated Gradient (NAG)
Nesterov momentum evaluates the gradient at a look-ahead point: \[ y_k=x_k+\beta(x_k-x_{k-1}),\qquad x_{k+1}=y_k-s\nabla f(y_k). \]
Heavy-ball uses (f(x_k)), while Nesterov uses (f(y_k)).
That means Nesterov anticipates the momentum step and corrects earlier, reducing overshoot.
Intuition
Heavy-ball:
- move by velocity
- react using current-point gradient
Nesterov:
- predict where velocity will move you
- compute gradient there
- correct before overshooting
Convergence Rate
For smooth strongly convex problems:
- Gradient descent: about (1-(1/))
- Heavy-ball/Nesterov-type acceleration: about (1-(1/))
For general smooth convex problems (not strongly convex), Nesterov achieves \[ f(x_k)-f(x^\star)=O(1/k^2). \]
Why It Matters in Deep Learning
Nesterov-style acceleration appears in practical training stacks:
- SGD with Nesterov momentum (
nesterov=True) - Classical CNN training pipelines
- Foundation for variants like Nadam
Takeaway. Momentum and Nesterov acceleration improve optimization by combining gradient information with velocity memory and look-ahead correction, replacing ()-limited behavior with ()-scaled dynamics in ill-conditioned landscapes.