MIT 18.065: Lecture 25 - Stochastic Gradient Descent
Many optimization problems in machine learning have the same structure: the objective is an average of per-sample losses. This lecture explains why that structure leads naturally to stochastic gradient descent, and why the noise in SGD is both its strength and its limitation.
Finite-Sum Problems
A large class of models can be written as
\[ f(x)=\frac{1}{n}\sum_{i=1}^n f_i(x). \]
Examples:
Least Squares
\[ \frac{1}{n}\|Ax-b\|^2 = \frac{1}{n}\sum_{i=1}^n (a_i^\top x-b_i)^2 = \frac{1}{n}\sum_{i=1}^n f_i(x). \]
Lasso
\[ \frac{1}{n}\|Ax-b\|^2+\lambda \|x\|_1 = \frac{1}{n}\sum_{i=1}^n (a_i^\top x-b_i)^2 + \lambda \sum_j |x_j|. \]
Support Vector Machine
\[ \frac{1}{2}\|x\|_2^2 + \frac{C}{n}\sum_{i=1}^n \max\bigl(0,1-y_i(x^\top a_i+b)\bigr). \]
Deep Neural Networks
\[ \frac{1}{n}\sum_{i=1}^n \text{loss}\bigl(y_i,\mathcal{DNN}(x;a_i)\bigr) = \frac{1}{n}\sum_{i=1}^n f_i(x). \]
This finite-sum form is the reason SGD exists as a specialized optimization method.
Why SGD?
Full gradient descent uses
\[ x_{k+1}=x_k-\eta_k \nabla f(x_k) = x_k-\eta_k \frac{1}{n}\sum_{i=1}^n \nabla f_i(x_k). \]
The drawback is cost: when \(n\) is huge, computing the whole gradient every step is too expensive.
SGD replaces the full average with one randomly selected sample index \(i(k)\):
\[ x_{k+1}=x_k-\eta_k \nabla f_{i(k)}(x_k). \]
Each update is roughly \(n\) times cheaper, which is why SGD scales to massive datasets.
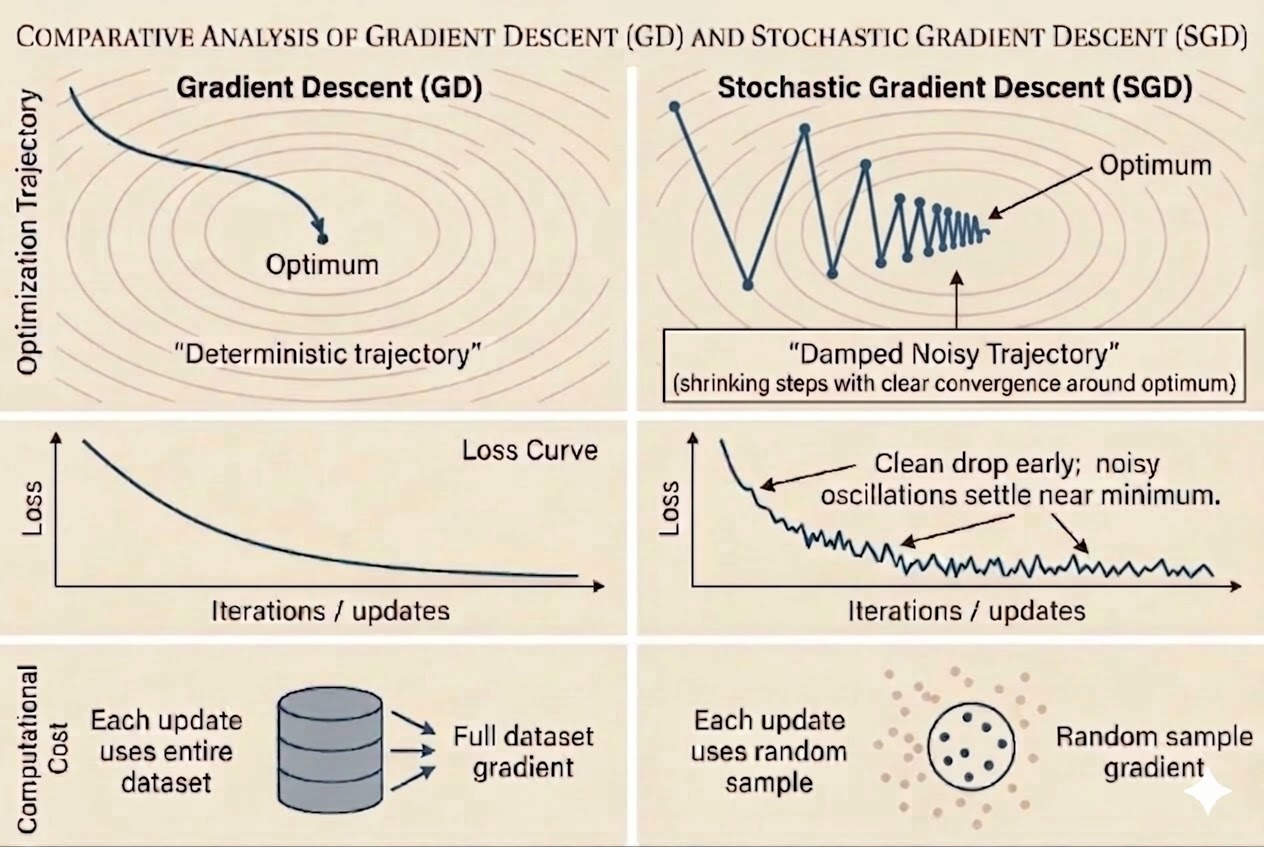
Why SGD Fluctuates
A common empirical pattern is:
- early iterations drop the loss quickly
- near the optimum, the iterates fluctuate instead of settling smoothly
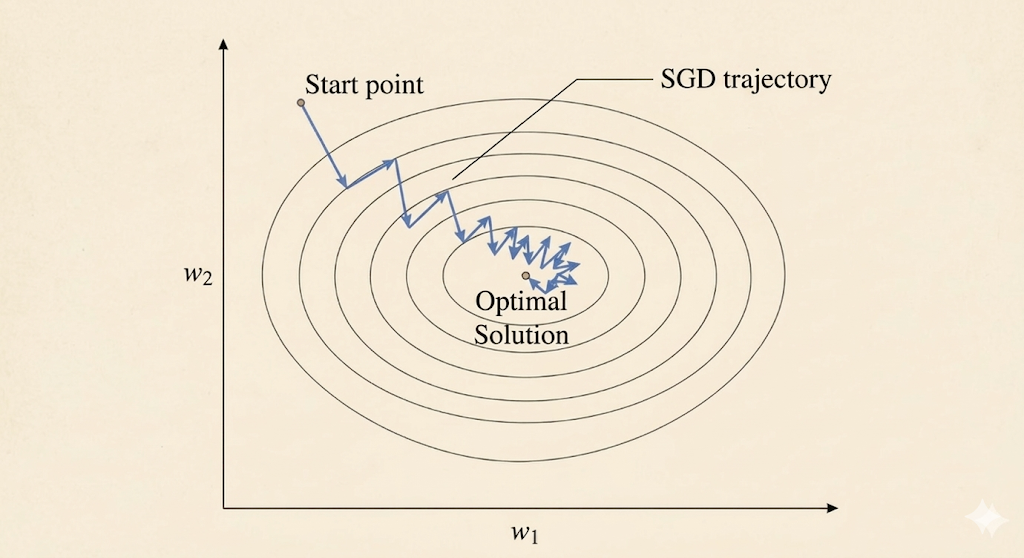
This is not a bug. It is the direct consequence of using noisy per-sample gradients.
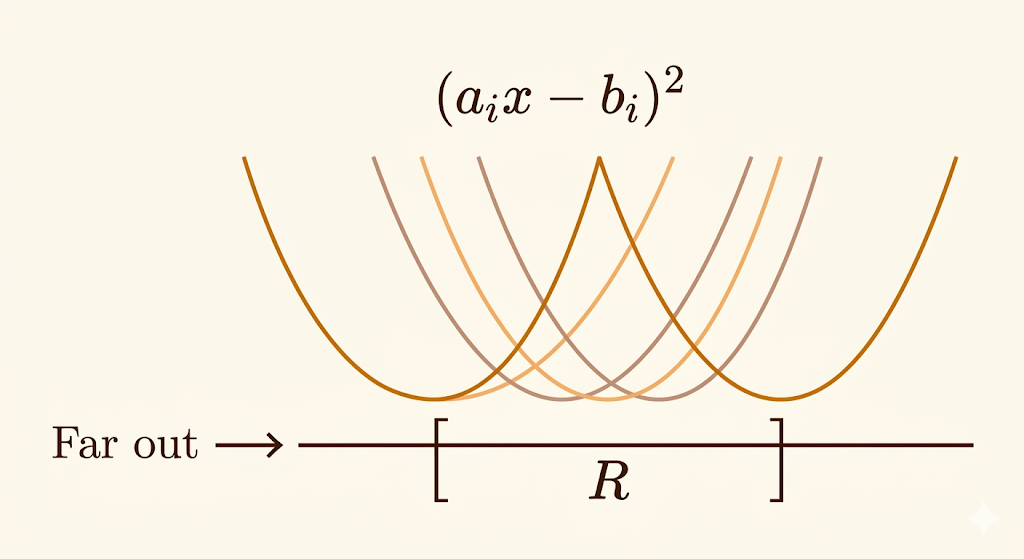
Geometric Intuition
Consider a 1D least-squares objective where each sample contributes
\[ f_i(x)=(a_i x-b_i)^2. \]
Each \(f_i\) is its own parabola with its own minimizer
\[ x_i^*=\frac{b_i}{a_i}. \]
Let
\[ R=[\min_i x_i^*,\max_i x_i^*]. \]
Then the global optimum of the whole dataset lies somewhere inside this region.
Two phases explain the SGD dynamics:
- Far outside \(R\), all sample gradients roughly point in the same direction, so SGD moves consistently toward the solution region.
- Inside \(R\), different samples pull in different directions, creating a tug-of-war that makes the iterates bounce around.
This is why SGD needs either a decaying learning rate or averaging if we want the fluctuations to shrink.
The Key Idea: Unbiased Gradient Estimates
SGD works because its noisy gradient is unbiased:
\[ \mathbb{E}[g(x)] = \nabla f(x). \]
Here:
- \(\nabla f(x)\) is the true full-dataset gradient
- \(g(x)\) is the stochastic gradient from one random sample
A single stochastic step may point in a bad direction, but on average these steps line up with the true descent direction.
That is the central tradeoff:
- exact gradient: expensive and stable
- stochastic gradient: cheap and noisy
Two Sampling Variants
With Replacement
At each step, pick an index uniformly from \(\{1,\dots,n\}\) independently of previous picks.
- easiest to analyze mathematically
- standard form in convergence proofs
- can revisit some samples many times before seeing others
Without Replacement
Shuffle the dataset once per epoch and then visit each sample exactly once.
- standard in practical machine learning code
- usually converges faster in practice
- harder to analyze theoretically
This is the difference between textbook SGD and the reshuffling used in most libraries.
Mini-Batch SGD
Mini-batch SGD averages a small subset \(J_k\) of samples:
\[ x_{k+1} = x_k-\frac{\eta_k}{|J_k|}\sum_{j\in J_k}\nabla f_j(x_k). \]
It sits between:
- batch gradient descent: use all samples
- SGD: use one sample
Why mini-batches matter:
- GPUs are efficient on matrix-matrix operations, so processing 32 or 64 samples together is often almost as cheap as processing one
- distributed training reduces communication overhead by synchronizing less often
- a little noise can help optimization and generalization
Very large mini-batches are not always favorable for deep learning, because they reduce gradient noise and can hurt the final generalization behavior.
Takeaways
- Many ML objectives are finite sums, which makes SGD a natural algorithmic match.
- SGD is cheap because it replaces the full gradient by one sample or a small batch.
- Near the optimum, sample gradients conflict, so fluctuations are expected.
- The reason SGD still works is unbiasedness: the noisy gradient points in the correct direction on average.
- In practice, shuffled passes and mini-batches are the default compromise between theory and hardware efficiency.
Source: MIT 18.065 Matrix Methods in Data Analysis, Signal Processing, and Machine Learning, Lecture 25.