Gilbert Strang’s Calculus: Differential Equations of Motion
The standard differential equation for damped motion is
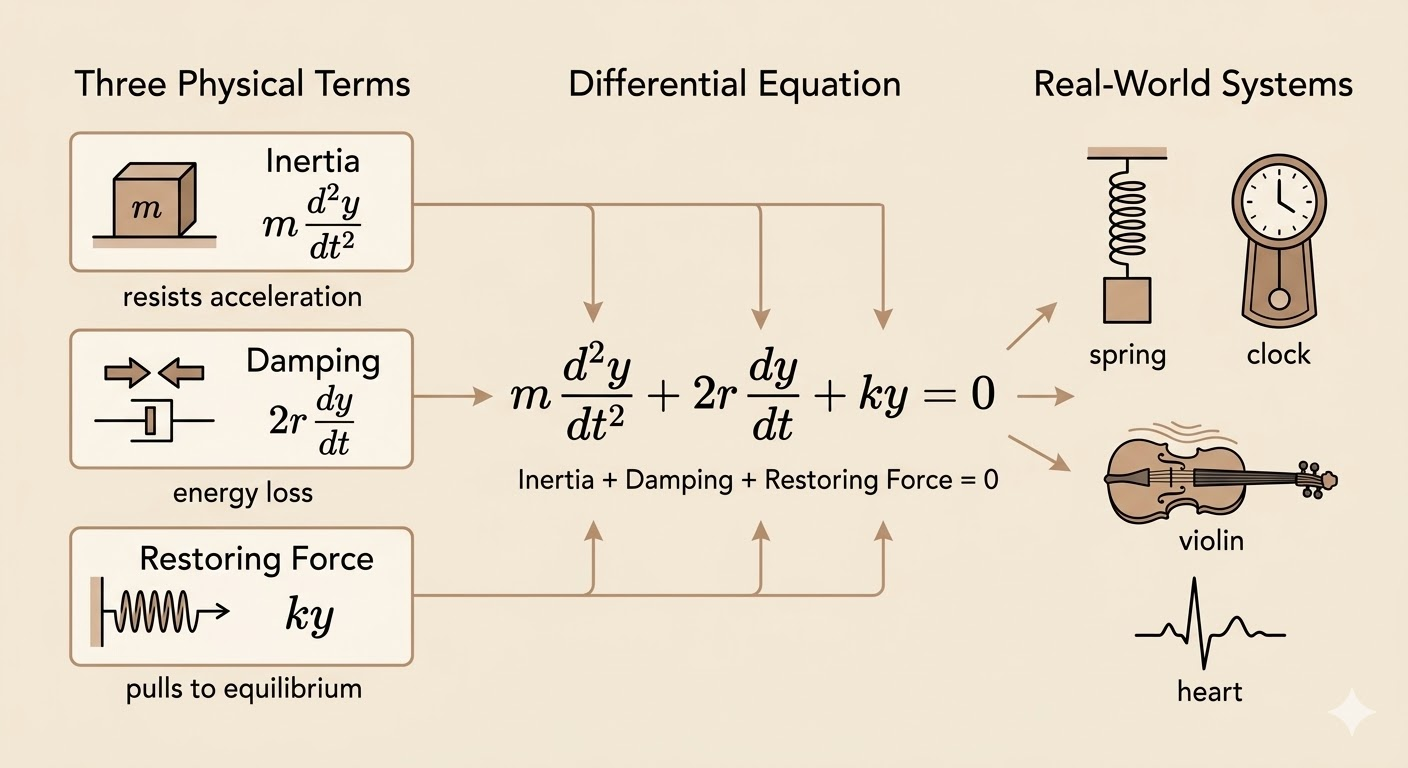
\[ m\frac{d^2y}{dt^2} + 2r\frac{dy}{dt} + ky = 0 \]
It is a linear second-order ODE with constant coefficients, and each term has a direct physical meaning.
The Standard Equation
\[ m\frac{d^2y}{dt^2} + 2r\frac{dy}{dt} + ky = 0 \]
- Inertia term: \(m y''\)
- The second derivative is acceleration.
- This is the mass resisting changes in motion.
- Damping term: \(2r y'\)
- The first derivative is velocity.
- This is friction or drag removing energy from the system.
- Restoring term: \(k y\)
- The function itself is displacement from equilibrium.
- This is the spring pulling the mass back toward the center.
| Term | Mathematical Derivative | Physical Component | Key Driver |
|---|---|---|---|
| Inertia | \(y''\) (Acceleration) | Mass \(m\) | Change in motion |
| Damping | \(y'\) (Velocity) | Friction \(r\) | Speed of motion |
| Restoring | \(y\) (Position) | Spring \(k\) | Distance from center |
Three Simple Starting Points
These special cases make the full equation easier to interpret.
No mass: \(m=0\)
The equation becomes
\[ 2r y' + ky = 0 \]
so
\[ y' = -\frac{k}{2r}y \]
and the solution is exponential decay:
\[ y(t) = Ce^{-\frac{k}{2r}t} \]
This is the pure damping case. Without inertia, the system just relaxes back toward equilibrium.
No damping: \(r=0\)
The equation becomes
\[ m y'' + ky = 0 \]
or
\[ y'' + \omega^2 y = 0, \qquad \omega^2 = \frac{k}{m} \]
This is the undamped oscillation case, with solution
\[ y(t) = C\cos(\omega t) + D\sin(\omega t) \]
The motion is periodic, so sine and cosine appear naturally.
No acceleration: \(y''=0\)
If the second derivative is zero, the function must be linear:
\[ y(t) = C + Dt \]
Oscillation
Oscillation appears in many systems:
- springs
- clocks
- music
- heartbeat
The trigonometric solutions in the undamped case are what generate this periodic behavior.
Characteristic Equation and Exponential Solutions
Start from
\[ m y'' + 2r y' + ky = 0 \]
and try an exponential solution
\[ y = e^{\lambda t} \]
Then
- \(y' = \lambda e^{\lambda t}\)
- \(y'' = \lambda^2 e^{\lambda t}\)
Substituting gives
\[ m\lambda^2 e^{\lambda t} + 2r\lambda e^{\lambda t} + k e^{\lambda t} = 0 \]
Since \(e^{\lambda t}\neq 0\), this reduces to the characteristic equation
\[ m\lambda^2 + 2r\lambda + k = 0 \]
with roots
\[ \lambda = \frac{-r \pm \sqrt{r^2-km}}{m} \]
So the entire behavior of the motion is controlled by the discriminant \(r^2-km\).
Three Root Cases
Overdamped: two distinct real roots
If
\[ r^2-km > 0 \]
then the two roots are real and distinct, and the solution is
\[ y(t) = C e^{\lambda_1 t} + D e^{\lambda_2 t} \]
Example 1
\[ y'' + 6y' + 8y = 0 \]
Here
- \(m=1\)
- \(r=3\)
- \(k=8\)
so the roots are
\[ \lambda = -2,\,-4 \]
and the solution is
\[ y(t) = C e^{-2t} + D e^{-4t} \]
Underdamped: complex roots
If
\[ r^2-km < 0 \]
then the roots are complex:
\[ \lambda = \alpha \pm i\beta \]
and the real solution can be written as
\[ y(t) = e^{\alpha t}(A\cos \beta t + B\sin \beta t) \]
This is the case where oscillation appears together with exponential decay.
Example 2
\[ y'' + 6y' + 10y = 0 \]
Here
- \(m=1\)
- \(r=3\)
- \(k=10\)
so
\[ \lambda = -3 \pm i \]
and the solution is
\[ y(t) = e^{-3t}(A\cos t + B\sin t) \]
The sine and cosine terms create oscillation, while the factor \(e^{-3t}\) makes the amplitude shrink over time.
Critical damping: repeated root
If
\[ r^2-km = 0 \]
then there is a repeated root
\[ \lambda = -\frac{r}{m} \]
and the second independent solution needs an extra factor of \(t\):
\[ y(t) = (C + Dt)e^{\lambda t} \]
Example 3
\[ y'' + 6y' + 9y = 0 \]
The repeated root is
\[ \lambda = -3 \]
so the solution is
\[ y(t) = (C + Dt)e^{-3t} \]
This is the critical damping case: the system returns to equilibrium as fast as possible without oscillating.
Takeaways
- \(m y'' + 2r y' + ky = 0\) is the standard model for damped motion.
- The three terms correspond to inertia, damping, and restoring force.
- Exponential trial solutions reduce the ODE to a quadratic characteristic equation.
- The sign of \(r^2-km\) separates the motion into overdamped, underdamped, and critically damped behavior.