Lecture 34: Distance Matrices, Procrustes Problem
From Distances to Geometry
Suppose we know only pairwise distances between points and want to decide whether those points can actually live in Euclidean space.
Let
\[ D_{ij} = \|x_i - x_j\|^2 \]
be the squared distance matrix. The key idea is that distances are not arbitrary: they must come from an inner-product matrix
\[ G = X^\top X, \]
where \(X = [x_1,\dots,x_n]\) contains the point coordinates. Since every Gram matrix has the form \(X^\top X\), it must be positive semidefinite.
That gives a clean test:
- start from squared distances
- recover the Gram matrix
- check whether that Gram matrix is PSD
If it is not PSD, then the distances cannot come from real Euclidean points.
Triangle Inequality Example
Suppose three points are claimed to satisfy
\[ \|x_1-x_2\|^2 = 1, \qquad \|x_2-x_3\|^2 = 1, \qquad \|x_1-x_3\|^2 = 6. \]
The actual distances are therefore
\[ d_{12}=1, \qquad d_{23}=1, \qquad d_{13}=\sqrt{6}. \]
But the triangle inequality would require
\[ d_{13} \le d_{12} + d_{23} = 2, \]
and \(\sqrt{6} > 2\). So these three points cannot exist in Euclidean space.
This is the geometric check. The matrix check reaches the same conclusion.
Distance Matrix and Gram Matrix
For any points \(x_i\) and \(x_j\),
\[ \|x_i-x_j\|^2 = x_i^\top x_i + x_j^\top x_j - 2x_i^\top x_j. \]
If \(G = (g_{ij}) = X^\top X\), then
\[ D_{ij} = g_{ii} + g_{jj} - 2g_{ij}. \]
So \(D\) is determined by the Gram matrix. The reverse direction is also possible after centering.
Let
\[ J = I - \frac{1}{n}\mathbf{1}\mathbf{1}^\top. \]
This subtracts the mean, so multiplying by \(J\) centers the point cloud. For centered data, the Gram matrix is recovered by the double-centering formula
\[ G = -\frac{1}{2}JDJ. \]
This formula is the bridge from distances back to inner products.
PSD Test for the Example
For the example above,
\[ D = \begin{bmatrix} 0 & 1 & 6 \\ 1 & 0 & 1 \\ 6 & 1 & 0 \end{bmatrix}. \]
Applying double-centering gives
\[ G = -\frac{1}{2}JDJ = \begin{bmatrix} \frac{13}{9} & \frac{1}{9} & -\frac{14}{9} \\ \frac{1}{9} & -\frac{2}{9} & \frac{1}{9} \\ -\frac{14}{9} & \frac{1}{9} & \frac{13}{9} \end{bmatrix}. \]
Its eigenvalues are
\[ 3,\quad 0,\quad -\frac{1}{3}. \]
The negative eigenvalue means \(G\) is not positive semidefinite, so the squared distances do not come from any Euclidean configuration. This matches the triangle-inequality failure.
The broader lesson is:
- a valid Euclidean squared distance matrix produces a PSD Gram matrix after double-centering
- if the recovered Gram matrix has a negative eigenvalue, the geometry is impossible
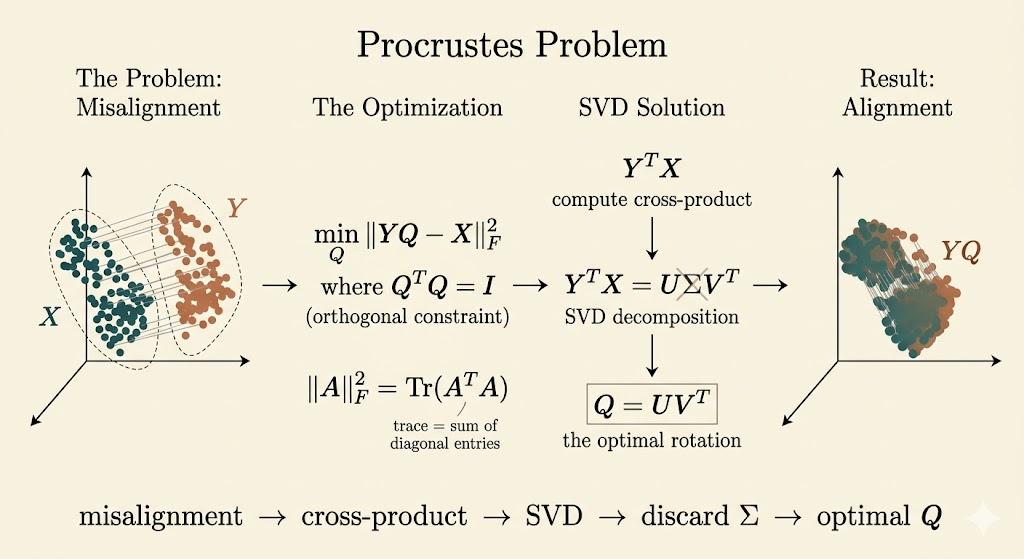
Procrustes Problem
The second topic in the lecture asks a different question: if two point clouds already exist, how do we align one to the other as well as possible?
Given a target matrix \(X\) and a current configuration \(Y\), the orthogonal Procrustes problem is
\[ \min_{Q^\top Q = I} \|YQ - X\|_F^2. \]
Here \(Q\) is constrained to be orthogonal, so it can rotate or reflect the data but cannot scale or shear it.
Why the Frobenius Norm Becomes a Trace Problem
The Frobenius norm satisfies
\[ \|A\|_F^2 = \operatorname{trace}(A^\top A). \]
So
\[ \|YQ - X\|_F^2 = \operatorname{trace}((YQ-X)^\top (YQ-X)). \]
Expand:
\[ \|YQ - X\|_F^2 = \operatorname{trace}(Q^\top Y^\top YQ) - 2\operatorname{trace}(Q^\top Y^\top X) + \operatorname{trace}(X^\top X). \]
Since \(Q^\top Q = I\),
\[ \operatorname{trace}(Q^\top Y^\top YQ) = \operatorname{trace}(Y^\top Y), \]
which is constant with respect to \(Q\). Therefore minimizing the Frobenius norm is equivalent to maximizing
\[ \operatorname{trace}(Q^\top Y^\top X). \]
SVD Solution
Take the singular value decomposition of the cross-matrix:
\[ Y^\top X = U\Sigma V^\top. \]
Then
\[ \operatorname{trace}(Q^\top Y^\top X) = \operatorname{trace}(Q^\top U\Sigma V^\top). \]
Using cyclic invariance of trace, define
\[ Z = U^\top Q V. \]
Because \(Q\), \(U\), and \(V\) are orthogonal, \(Z\) is also orthogonal. Then
\[ \operatorname{trace}(Q^\top Y^\top X) = \operatorname{trace}(Z^\top \Sigma) = \sum_i \sigma_i z_{ii}. \]
For an orthogonal matrix, each diagonal entry satisfies \(|z_{ii}| \le 1\), so
\[ \operatorname{trace}(Z^\top \Sigma) \le \sum_i \sigma_i. \]
The maximum is achieved when \(Z = I\), which means
\[ Q = UV^\top. \]
So the orthogonal Procrustes problem has the elegant closed-form answer
\[ Q_{\star} = UV^\top, \qquad \text{where } Y^\top X = U\Sigma V^\top. \]
This is a beautiful pattern: the singular values measure how well the two point clouds match, and the orthogonal part \(UV^\top\) gives the best rigid alignment.
Interpretation
- the distance-matrix part of the lecture asks whether geometry is feasible at all
- the Procrustes part assumes geometry exists and asks for the best orthogonal alignment
- both topics reduce geometry to matrix structure: PSD for feasibility, SVD for alignment
If we also impose \(\det(Q)=1\), then reflections are forbidden and the problem becomes the rotation-only version often used in shape matching and point-cloud alignment.
Takeaways
- squared Euclidean distances determine a centered Gram matrix through \(G = -\frac{1}{2}JDJ\)
- valid Euclidean distance data must produce a positive semidefinite Gram matrix
- triangle inequality failure and a negative Gram-matrix eigenvalue are two views of the same inconsistency
- the orthogonal Procrustes problem reduces to maximizing a trace
- the best orthogonal alignment is obtained from the SVD of \(Y^\top X\) via \(Q_\star = UV^\top\)